下一个: 四面体包含 上一级: 插值程序 上一页: 主人的四面体化 目录
线性四面体的重心形成点云。算法的关键部分之一是快速选择请求插值的给定新位置最近的 n 个点。该过程在二维中如图 209 所示。
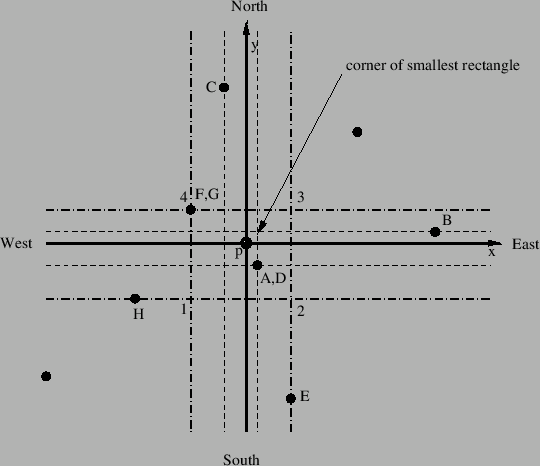
两个全局轴的交点 p 是执行插值的点。黑圆圈表示点云。假设我们想知道最近的 3 个点。云中的点以两个排序数组提供,一个按全局 x 方向排序,一个按全局 y 方向排序。首先,使用 ident.f 程序确定点 p 在这两个数组中的位置。然后,以 p 为中心扩展一个矩形,分别向东、北、西、南方向扩展,直到达到云中的下一个点。这用简单的虚线表示,点分别记为 A、B、C 和 D(A 和 D 重合)。然后计算 p 到这些点的距离,进行排序,并存储在一个数组中。该数组的大小是请求的最近邻居的数量,所以在我们的情况下只保留最小的三个距离。
接下来,矩形在每个方向上继续扩展,直到到达下一个云点,分别记为 E、F、G 和 H。同样,计算 p 到这些点的距离,存储在距离数组中,排序并保留最小的三个值(只需要三个最近的点)。现在,重复此过程,直到 p 到矩形角点之一的最小距离(图中最长矩形用 1、2、3 和 4 表示)超过距离数组中的最大值。然后我们知道已经找到了最近的三个相邻点。
三维中的过程完全等价,我们只是多了两个方向"向后"和"向前"。